
En el Programa de control de estabilidad electrónica EPS se necesita un sensor de par y ángulo de dirección, que detecta los pares de rotación aplicados a la barra de torsión del eje de dirección junto con los ángulos de dirección (ángulo de rotación) en el momento de la dirección, y posteriormente introduce estas señales de par y ángulo, con el fin de
determinar la salida de control, en la unidad de control electrónico (ECU) que controla la fuerza de rotación del motor de asistencia. El ángulo de dirección y el sensor de par que se informa aquí ha sido diseñado y desarrollado en este contexto.

El sensor de par en el sistema de dirección asistida eléctrica mide el par que el conductor aplica al volante. A partir de estos datos, la centralita electrónica calcula la asistencia a la dirección que debe aplicar el motor eléctrico.
Un sistema de dirección asistida es fundamentalmente un servo de par,
. El sistema debe determinar cuánto torque está aplicando el conductor al volante y posteriormente la ECU de la dirección añada un cantidad de asistencia para mantener el torque aplicado por el conductor en el valor requerido. El conductor completa el circuito de control de posición general, operando el volante hasta que el se logra la trayectoria deseada del auto.
A pesar de esto, los sensores de posición también pueden ser necesarios en un sistema EPS para determinar la posición de la columna de dirección («ángulo de dirección») para autocentrado activo y amortiguación. La señal del ángulo de dirección también se puede emplear por otros sistemas en el vehículo, como sistemas de control de deslizamiento y sistemas de control de la dirección de los faros. Sin embargo, es perfectamente posible hacer un EPS básico con un sensor de par.
Una parte importante del diseño de un sistema EPS es elegir la tecnología de sensor de par más adecuada para la aplicación. Aunque aparentemente simple a primera vista, El par es en realidad uno de los parámetros físicos más difíciles de medir. Se han instalado muchos sensores de par propuestos a lo largo de los años, y se siguen inventando. Sin embargo, solo unos pocos se han diseñado con éxito en productos de bajo costo para la fabricación de grandes volúmenes.
Parámetros

0,015 Nm
es la resolución con la que la ECU puede calcular el ángulo de dirección sobre la base de los datos del sensor del sensor de par.
−40 ° C hasta +125 ° C
es el rango de temperatura en el que el sensor de par del sistema de dirección asistida eléctrica funciona de forma absolutamente fiable.
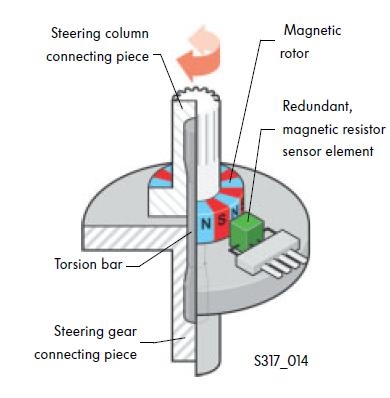
El sensor se encuentra en el piñón de dirección. En el eje de entrada se monta una rueda polar, que se conecta al piñón de dirección mediante la barra de torsión. Cuando el conductor aplica torque al volante, se gira la barra de torsión y, a su vez, el imán en relación con el sensor. El sensor consta de elementos magnetorresistivos cuya resistencia cambia a medida que cambia la dirección del campo. El rango de medición del sensor cubre +/− 10 Nm. Un limitador de ángulo mecánico evita que la barra de torsión se sobrecargue cuando se aplican pares de dirección más altos.